Research
Our expertise in robotics is globally relevant and renowned, encompassing areas from robotics for rehabilitation and extreme environments to bio-inspired systems and soft robotics. Discover more about our research areas below:
Bio-inspired robotic tails
The motivation for mobile robotics has predominately been driven by the need for systems capable of exploring hazardous and extreme environments that are too dangerous for people. Examples include nuclear decommissioning, where radiation is potentially fatal, and planetary exploration, where it is not possible to send and retrieve astronauts.
Mobile robots have been successfully developed and used to explore nuclear sites such as Sellafield and Fukushima as well as the Martian surface. However, obstacles and challenging terrain limit activities and can lead to the loss of robots which are often non recoverable. Mobile robots have evolved from wheeled machines to legged systems, which can run, jump or hop. These abilities enable mobile robotic systems to better adapt and navigate adverse terrain. In other words, mobile robotic systems are becoming increasingly agile.
As mobile robots move more towards increased agility, dynamic abilities and biomimetics, this has influenced the direction of research into investigating strategies for improving dynamic performance and stability by exploring the use of robotic tails to improve performance and robustness.
Key contact: Andy Weightman
Demonstration of how a robotic tail can adjust the angular orientation of a robot in dynamic motion.
Collaborative robotics for manufacturing
Collaborative robots, or ‘cobots’ as they are often called, can be defined as a robot that has been designed and manufactured to collaborate with humans. They are very different from industrial robots, which are too dangerous to allow workspace co-habitation with humans.
Advanced manufacturing is highly automated but there are still many opportunities for collaborative robots to add value and they are revolutionising manufacturing. For example, they have significant potential for loading materials onto manufacturing lines, unloading products and supporting activities on the line.
We are working with manufacturing industries in Manchester to support the implementation of cobot technologies to improve productivity and reduce the need for people to undertake dull and dirty activities.
Key contact: Andy Weightman

Collaborative robots: our researchers enjoy access to advanced robotic facilities
Robotics for extreme environments
Robots are an attractive alternative to people working in extreme environments which are hazardous for humans. Extreme environments include nuclear applications, offshore renewables, space and deep sea mining; all of these areas are of interest to our multidisciplinary research team.
We have active projects developing next-generation glove boxes for the nuclear industry, robots for landing on and inspecting offshore wind turbine blades and robots for inspecting dams. All of these projects require multidisciplinary knowledge about the effects of these extreme environments on robotic technology and the skills of conception, design, implementation and operation.
Key contact: Andy Weightman
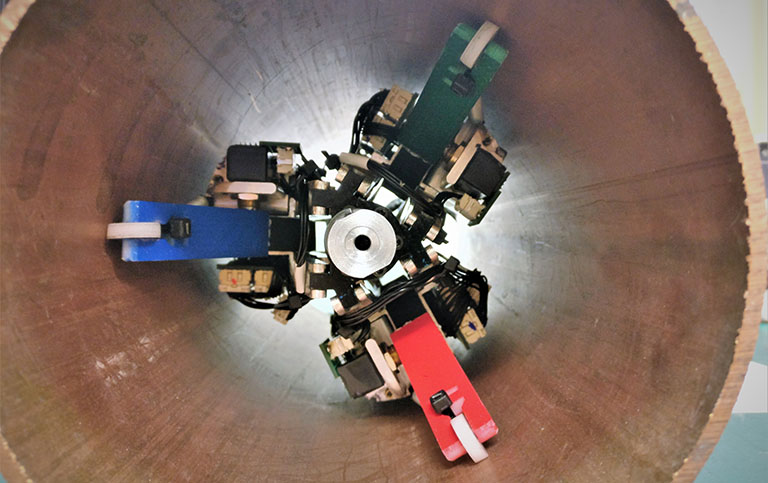
The Furo II robot has been designed for radiation inspection in pipelines, an essential post-operation in nuclear decommissioning activity.
Robotics for rehabilitation
Rehabilitation robots aim to promote engagement with useful therapeutic exercises to promote motor learning and function of the neurologically impaired. Neurological impairments include stroke, which is the commonest form of severe physical adult disability, and cerebral palsy, the commonest form of severe childhood physical disability in the UK.
Rehabilitation robotics is a multi-disciplinary field that involves healthcare professionals such as medical doctors and physiotherapists, as well as mechanical, electrical, electronic and software engineers.
Our aim is to develop rehabilitation robotics systems that can transform people’s lives, enabling them to better engage with society, while reducing the economic costs associated with healthcare provision.
Key contacts: Andy Weightman, Glen Cooper
Animation of a home-based rehabilitation robot, showing variety of articulation
Soft robots
Most conventional robots are constructed from stiff materials and are usually powered directly by electric motors or by hydraulic fluids through rigid tubes. However, very few of these machines can operate in natural environments or in close proximity to humans.
Soft robots have a number of attributes that make them highly advantageous: their inherent compliance makes it virtually impossible for them to damage the environment in which they are deployed and they are much cheaper to manufacture than conventional hard robots.
One particular type of soft robot is a pneumatically actuated vine-bot. These robots are lightweight, agile and can adjust their shape to explore complex confined and obstructed spaces. This makes them highly suitable for search and rescue operations after buildings collapsing or exploration of extreme nuclear environments.
Our goal is to innovate and develop this technology facilitating its application to challenges facing our society.
Key contacts: Lei Ren, Mostafa Nabawy
Space robotics
Space robotics is a multi-disciplinary field that unites key technology disciplines including robotics, computer science, space engineering and space science.
Alongside traditional scientific exploration of the solar system, there is an emerging market for commercialising space robotics for activities such as in-orbit servicing and asteroid mining, all of which involve the navigation of complex surface environments. Novel robotics technologies will enable new opportunities for the development of space exploration.
The next generation of autonomous explorers will need to break the mould of traditional designs in order to navigate complex, cluttered space environments. Inspired by animal locomotion, we aim to build systems that can crawl, climb, jump, fly and swim, and provide new and expanded capabilities for robotic explorers.
Key contacts: Andy Weightman, Kate Smith, Ben Parslew

Prototype for lunar jumping robots, able to navigate complex planetary environments
Underwater propulsion for robotics
What penguins lack in flight ability, they make up for in manoeuvrability underwater. Penguins are highly adept swimmers, capability of propelling themselves at high speeds with precise control. Like flying birds, penguins’ bodies and wings are covered in feathers. They also have also evolved highly efficient and precise kinematics to negotiate undersea currents with minimal energy expenditure.
Our work uses high-fidelity videography to capture 3D surface geometries and build detailed fluid dynamic models of the surrounding flowfield. We consider both a simplified rigid-skin model, and also more advanced flexible surface models. From here, we are able to determine how kinematics and surface structures have co-evolved to yield effective propulsion mechanics.
At smaller scales we develop micro-robotic swimming devices from examining the propulsive mechanism of spermatozoa. These devices provide a route to minimally invasive surgery by being deployed within the human body. Our work has synthesized prototype devices and tested these in laboratory conditions to determine energy-efficient tail designs and kinematics.
Key contact: Ben Parslew
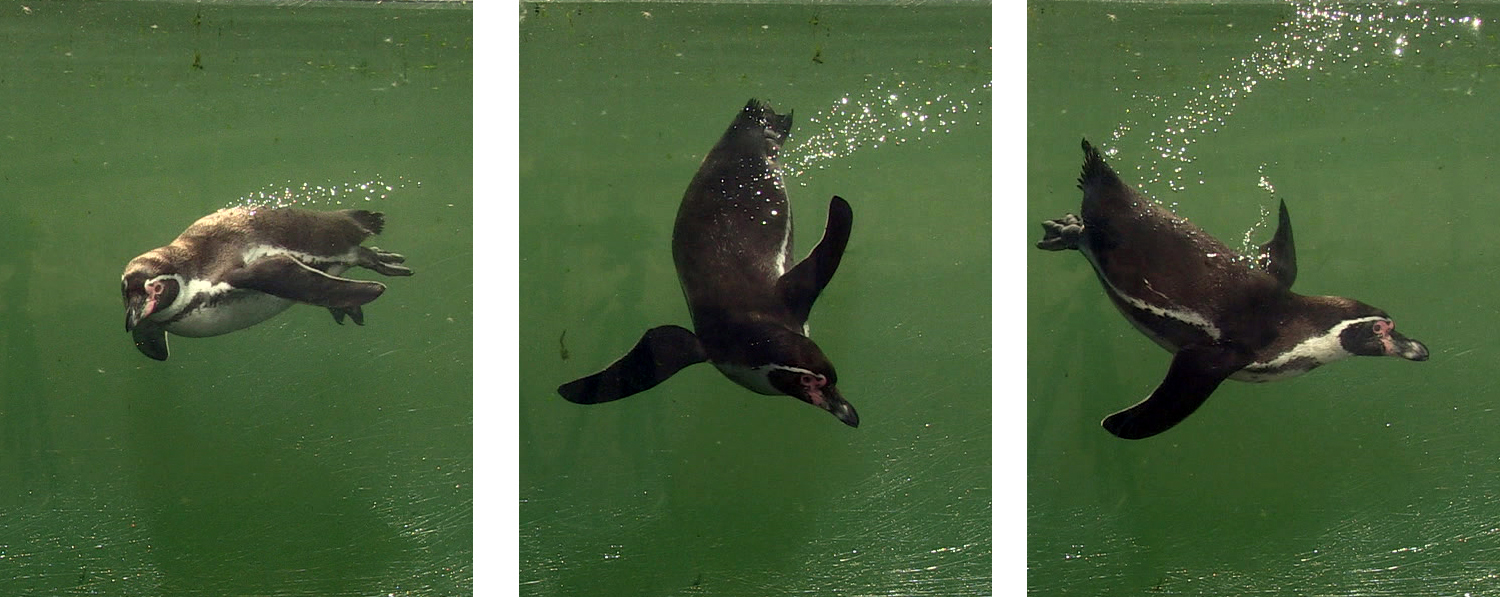
Glide and spin: Humboldt pengiun (Spheniscus humboldti) performing a rapid turn underwater.
Opportunities
Find out about research opportunities in Robotics and how to apply.
Meet the team
Find contacts for our academic staff, postdocs and PhD researchers in Robotics.
Contact Us
+44 (0) 161 306 6000
Connect With Us
