Our research
Agile robotics
The future of robotics research is to develop devices that are fast, more efficient, and manoeuvrable. Highly agile mobile robots will walk, run, climb and jump. This will make them essential in rescue operations on mountains or inside caves, or for climbing debris from a natural disaster. It will also allow us to send robots into cluttered nuclear radiated sites, making decommissioning easier and safer. Our biomimetic approach draws from the precision and agility we see in nature, to develop advanced mobile robotics.
We use jumping animals as a model system for future mobile robots and have developed a fundamental theoretical understanding of how animals leap with precision and stability. We are using this knowledge to develop advanced jumping robots that are both powerful and precise. Our jumping robots will able to leap and land on clutter, providing an efficient means of exploring complex environments that would be inhospitable to humans.
Media coverage
Scientific American: What Birds Can Teach Us about Flying Robots
Audubon Magazine: How Birds Take Flight With Such Ease?
phys.org: Why Don’t Birds Fall Over When They Jump?
Aquatic propulsion
What penguins lack in flight ability, they make up for in manoeuvrability underwater. Penguins are highly adept swimmers, capability of propelling themselves at high speeds with precise control. Like flying birds, penguins’ bodies and wings are covered in feathers. They also have also evolved highly efficient and precise kinematics to negotiate undersea currents with minimal energy expenditure.
Our work used high fidelity videography to capture 3d surface geometries and build detailed fluid dynamic models of the surrounding flowfield. We consider both a simplified rigid-skin model, and also more advanced flexible surface models. From here, we are able to determine how kinematics and surface structures have co-evolved to yield effective propulsion mechanics.
At smaller scales we develop micro-robotic swimming devices from examining the propulsive mechanism of spermatozoa. These devices provide a route to minimally invasive surgery by being deployed within the human body. Our work has synthesized prototype devices and tested these in laboratory conditions to determine energy-efficient tail designs and kinematics.
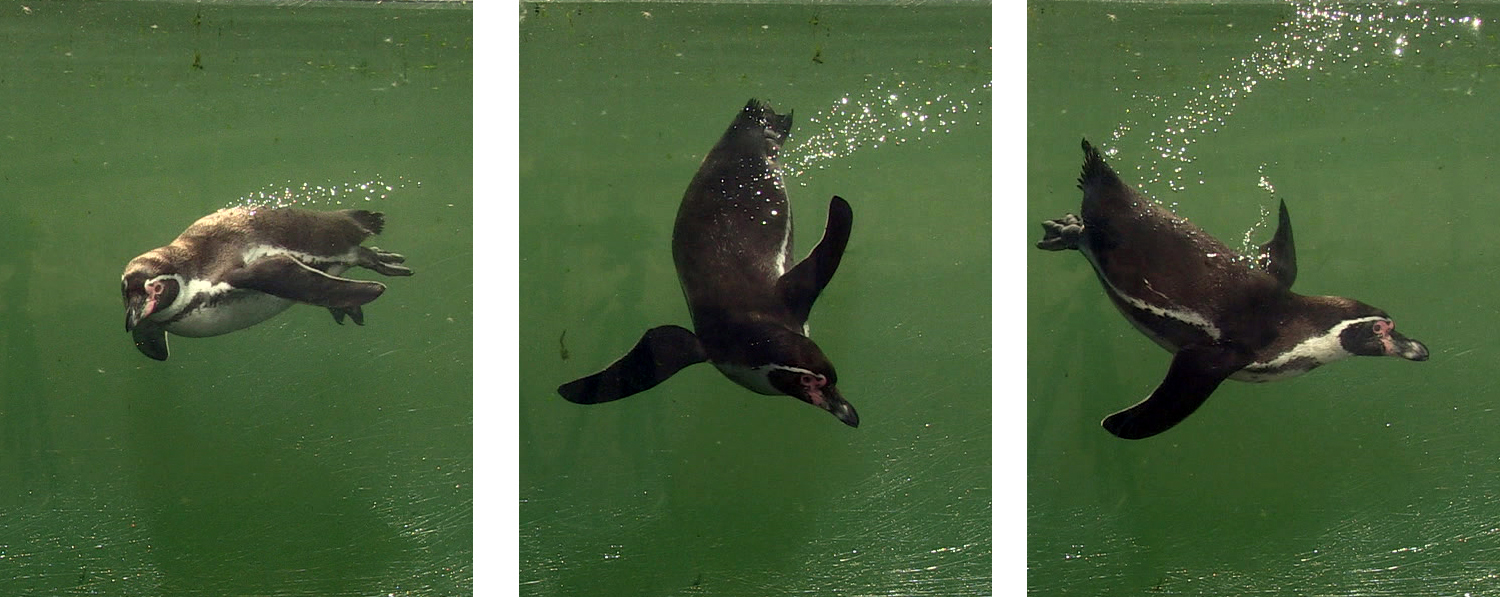
Glide and spin: Humboldt pengiun (Spheniscus humboldti) performing a rapid turn underwater.
Bio-inspired surfaces
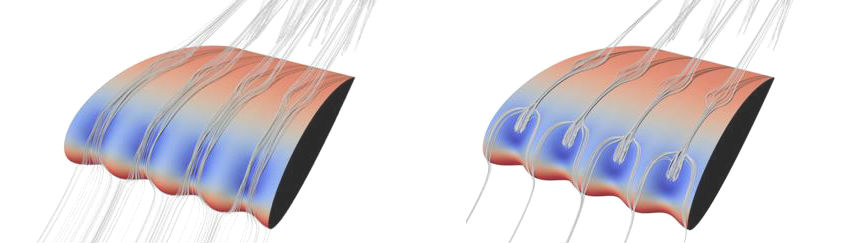
During extreme landings bird feathers are often seen to pop-up from their upper wing surfaces. This curious phenomenon is considered to maintain favourable attached flow conditions, allowing for a more controlled landing. Our research into bio-inspired flow control had focussed on porous and elastic coatings, inspired by bird feathers. These engineered coatings adapt to local flow conditions particularly for separated flow, which can lead to reduced form drag by decreasing the intensity and the size of the recirculation region. This concept of flow control is novel, and can be tuned to be efficient than classical actuators.
The core long-term goal of this approach is to enhance the performance of future air transport. There is potential to use the same techniques to increase make fixed-wing unmanned aerial vehicles more manoeuvrable. We are even investigating how these next-generation coatings can be applied to land and underwater vehicles.
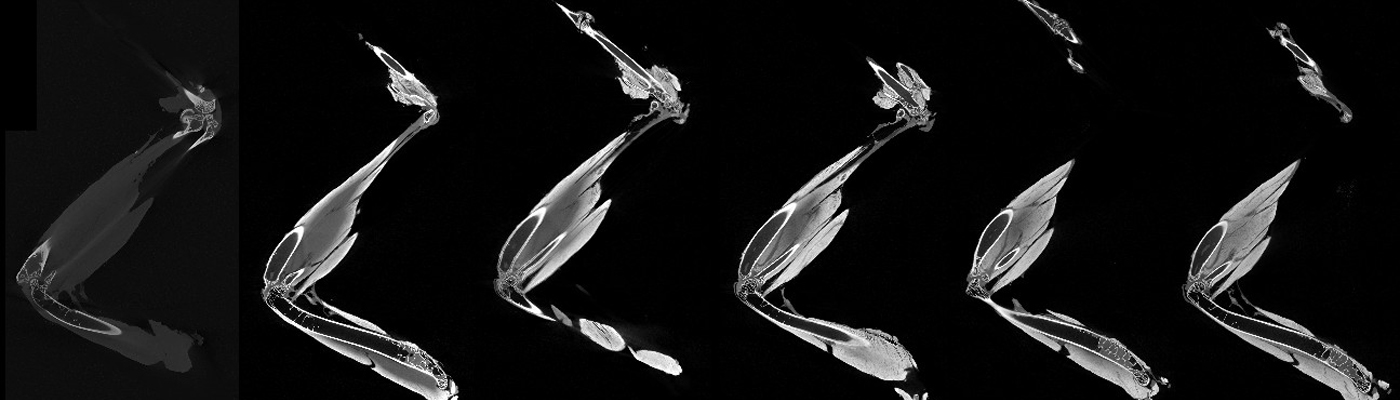
Wavey elastic coatings: (top) oscillating fluid flow fluid over an array of elastic follicles; (bottom) composite image of oscillating follicles within a uniform flow.
Flight biomechanics
Drones will soon negotiate the skies in a manner that rivals the most agile flying animals. To inspire more capable and more efficient drone design we examine the physics of flight across a range of scales, from tiny insects to the largest extinct pterosaurs. Our work uncovers the fundamental aerodynamics and flight dynamics seen in nature to establish guiding principles for the design of aerial robots.
We use high fidelity computational models and machine learning to uncover the efficient methods of taking-off and flying. Working closely with biologists we also go beneath the surface, investigating the muscular skeletal systems that drive animals through the air. This provides insights into future designs of precision actuators for flight control, enhancing the manoeuvrability of next generation drones.
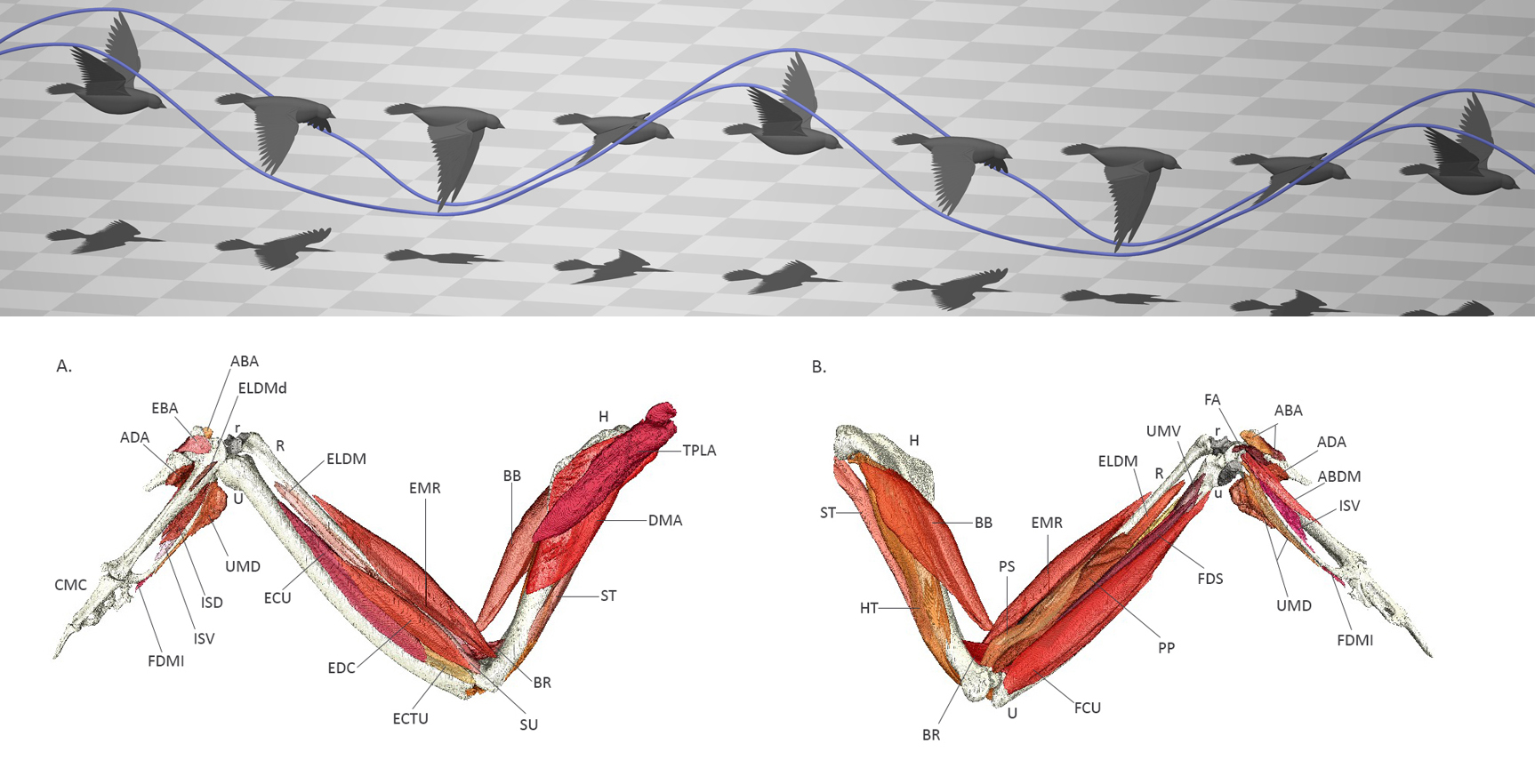
Flight dynamics modelling and micro CT scan detecting the muscular skeletal system of the wing of a sparrowhawk (Accipiter nisus).
Media coverage
Computer Graphics World: Digital Flocks in film Noah (2014)
Future flow control devices
Flying and swimming animals have evolved unique flow control mechanisms that can be utilised in engineering systems. These large-scale structures are visible to the human eye, but we are lacking a complete understanding of their biomechanical function.
A classic example is the slotted wingtips of soaring birds, where the distal primary feathers separate from one another and are believed to reduce drag. Our research has been testing this hypothesis, while developing practical engineering designs of future aircraft wingtips. Our insights into the form-function relationship in bird wing morphologies allow us to expand the performance boundaries of current aerospace designs.
We also study the leading-edge tubercles seen on the whale flippers. These small projections are easily spotted when a whale raises a flipper out of the water. But their influence on the flow as they propel the whale forwarded is currently unclear. We have conducted detailed computational and experimental studies to obtain a clear understanding of how tubercle size and shape affects the fluid dynamic performance.
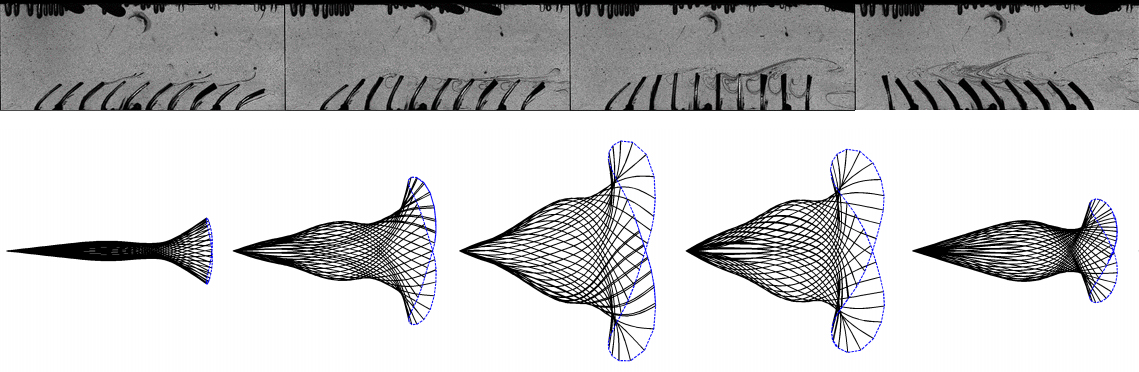
Streamlines over whale wings. Simulated flows over lifting surfaces with undulating leading edges, inspired by whale fin tubercles.
Collective swimming dynamics
We use the Lattice-Boltzmann Method for modelling complex flows to better understand fields such as underwater propulsion and collective behaviour of self-organised groups. The videos below show examples of each of these.
Self-propelled agents in a tortuous domain
An agent is appointed to be the leader and guides the group along a prescribed path. Individuals experiencing the presence of the surrounding fluid (white dots) exhibits more cohesion than the hydrodynamic-free ones (blue), with the group fragmentation being delayed.
A diamond-like formation of self-propelled elastic filaments
The front one is the most advantaged. The vorticity generated by the group plays a detrimental role on the propulsive performance of the upper and bottom ones and are overcome by the rear one.
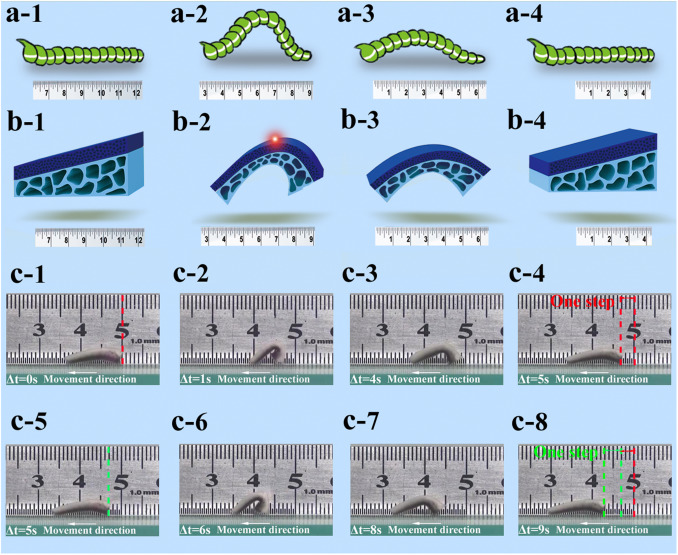
Soft robots for biomedical applications
A soft robot is an engineered mobile machine that is largely constructed from soft materials. Most conventional robots are constructed from stiff materials such as steel, aluminium and plastics. They are usually powered directly by electric motors or by hydraulic fluids through rigid tubes.
Such machines are capable of high speeds and great precision, making them very productive in factory assembly lines. However, very few of these machines can operate in natural environments or in close proximity to humans. To overcome some of these obstacles there is an increasing interest in building robots from soft materials.
Our goal of soft robotics is to make machines that are adaptable and more creature-like in their capabilities by using soft active materials, advanced manufacturing techniques and biologically inspired designs. These robots may find many biomedical applications where the working environments are filled with variety and continuously changing conditions.
Opportunities
Find out about research opportunities in Biomimetics and how to apply.
Activities and events
Find out about upcoming seminars, conferences and courses.
Contact Us
+44 (0) 161 306 6000
Connect With Us
