Our research
Below you’ll find some examples of our currently active research topics in miniature engineering systems and robotics inspired by nature.
Bio-inspired robots
The development of robots at very small scale consistent with insects offers an exciting engineering opportunity for innovation, with applications ranging from artificial pollination to massively distributed sensing. Imagine using micro-robots to protect crops from insect pests instead of using insecticides. Or even possible future scenarios in which it is necessary to defend against hostile micro-robots.
Through biological inspiration and engineering practicality, serious steps are being taken in the Microsystems Lab towards enabling the future of micro-robots. A future where smart micro-robots are deployed in unknown environments and can plan and execute useful missions against given goals.
Our research develops analytical and experimental models for fluid mechanics and actuation dynamics, and integrating these models to the design of micro-robotic demonstrators. We are currently developing two bio-inspired systems. The first is influenced by the extraordinary jumping capability of certain spiders, whilst the second reflects the flying capability of bees.
Energy harvesters
We develop novel concepts for simultaneously harvesting both solar and wind energy via flexible flaps combining photovoltaic cells with piezoelectric material. The primary application is to provide continuous power supply to remote sensors or platforms where a power supply is required over a long duration.
Whether deployed at ground level or tethered/suspended in the atmosphere, dual piezo-solar devices have the potential to realise a more continual daily source of renewable energy generation. We bring a unique combination of skills to develop toolsets for designing, realizing and testing of micro energy harvesting concepts.
We have extensive experience in modelling and testing the dynamics and power generation characteristics of different piezoelectric materials and configurations. Our range of experimental facilities measures sensing/harvesting performance subject to different sources of excitation. And unique numerical capabilities provide the necessary tools for design of experiments under real conditions and minimise cost.
Flying insects - aerodynamic theory
Flapping-wing insect flight is rich in complex aerodynamic phenomena that are still not fully understood. We are one of the few groups in the world who have been making consistently novel contributions to the development of analytical aerodynamic theories for insect-like wings.
Our aim is to develop and validate generic, transparent and compact modelling treatments for representing the aerodynamics of insect-like flapping wings. We have also developed cutting-edge experimental techniques (including kinematics tracking, force/torque measurements and flow visualisation) to explore the different aerodynamic mechanisms employed by flying insects.
Our goal is to develop deep understanding of the underlying physics that enables improved design of micro-flapping-wing vehicle propulsion systems and also informs the biological community regarding the morphology and evolution of flight systems in nature.
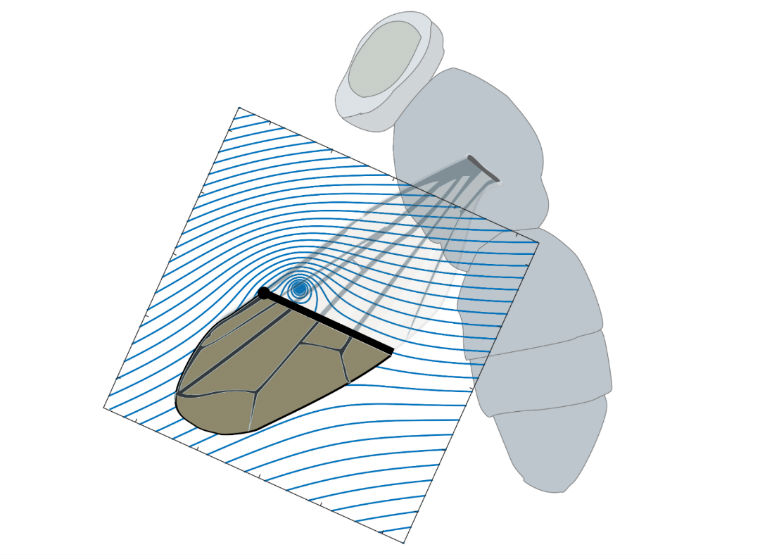
Simulation of flow around an insect wing
Jumping spiders
Jumping is a predominant mode of locomotion in the natural environment, with many insects and arachnids being capable of performing highly athletic and precise jumps for the purposes of moving about in their environment and/or catching prey.
We investigate the biomechanics, sensing, control and actuation strategies of jumping insects through computer simulation and innovative studies of live animals, and use this information to inform the design, optimisation and manufacture of insect-scale robot prototypes.
We are currently focusing on the biomechanics of jumping spiders. We have trained a spider to jump between platforms of varying height and distance, with results recorded using ultra-high-speed cameras, and detailed leg geometry captured using 3D X-ray scanning.
While the work allows significantly improved understanding of how these animals jump, it provides inspiration for a new class of agile micro-robots that are currently unthinkable using today’s engineering technologies.
Numerical modelling of microsystems
We investigate the hydrodynamic response of submerged microstructures by performing numerical simulations. Our approach covers a rich variety of physical problems, eg (i) solid bodies vibrating in a viscous fluid, (ii) bio-inspired propulsion and (iii) multicomponents flows through obstruction, among the others (see video below).
The computational technique is based on the lattice Boltzmann method, motivated by its algorithmic simplicity and natural suitability to tackle multiphysics problems.
Soft robots
Most conventional robots are constructed from stiff materials and are usually powered directly by electric motors or by hydraulic fluids through rigid tubes. However, very few of these machines can operate in natural environments or in close proximity to humans. To overcome some of these obstacles there is an increasing interest in building robots from soft materials.
Our goal of soft robotics is to make machines that are adaptable and more creature-like in their capabilities by using soft active materials, advanced manufacturing techniques and biologically inspired designs. These robots may find many biomedical applications where the working environments are filled with variety and continuously changing conditions.
Valveless micropumps
We develop valveless micro-pumps in the form of Synthetic Jet Actuators (SJA). These pumps have seen widespread attention as fluidic actuators for active control of aerodynamic flows, flow mixing, and heat transfer, among several other applications.
We have developed an efficient and reliable multi-physics approach for modelling piezoelectric resonant micro-pumps for fluid (gas and liquid) applications, plus in-house experimental capabilities (measurement for vibrations, pressures and flow velocity), as well as comprehensive knowledge and testing of piezoelectric devices to demonstrate the feasibility of the developed concepts.
Meet the team
Details and contacts for our academic staff, post-docs and PhD researchers.
In the media
Our Microsystems research has attracted worldwide media attention.
Contact Us
Connect With Us
